声成像原理acoustic imaging用声波获得物体内部结构特点的可见图像的方法
声成像利用声学、电子学和信息处理等技术
声波可以在很多不透光的物体中传播,利用声波可以获得这些物体内部结构的声学特性的信息;而声成像技术则可将其变换成人眼可见的图像,即可以获得不透光物体内部声学特性分布的图像
物体的声学特性分布可能与光学特性分布不尽相同,因而同一物体的声像可能与其相应的光学像有差别
声成像的研究开始于20世纪20年代末期
最早使用的方法是液面形变法
随后,很多种声成像方法相继出现,至70年代已形成一些较为成熟的方法,并有了大量的商品化产品
声成像方法可分为常规声成像、扫描声成像和声全息
常规声成像从光学透镜成像方法引伸而来
用声源均匀照射物体,物体的散射声信号或透射声信号,经声透镜聚焦在像平面上形成物体的声像,它实质上是与物体声学特性相应的声强分布
用适当的暂时性或永久性记录介质,将此声强分布转换成光学分布,或先转换成电信号分布,再转换为荧光屏上的亮度分布
如此即可获得人眼能观察到的可见图像
将声强分布变成光学分布的永久性记录介质有多种,如经过特殊处理的照相胶片,以及利用声致光效应和声致热效应的多种声敏材料
这些材料可对声像“拍照“,使其变成可直接观察的图像
但这种声记录介质的灵敏度较低,其阈值为0.1瓦/厘米2至数瓦/厘米2,信噪比也较低,且使用不便
声强分布的临时性记录,可用液面或固体表面的形变来实现
其方法是用准直光照射形变表面,或用激光束逐点扫描形变表面,其衍射光经光学系统处理可得到与声强分布相应的光学像
此外,还可用声像管将声像转换为视频信号,并显示在荧光屏上
声像管的结构与电视摄像管类似,只是用压电晶片代替了光敏靶
声像管可用于声像实时显示,其灵敏度阈值约为10-4瓦/厘米2
与扫描成像技术相比,工艺比较复杂、孔径有限而且灵敏度偏低
扫描声成像通过扫描,用声波从不同位置照射物体,随后接收含有物体信息的声信号
经过相应的处理,获得物体声像,并在荧光屏上显示成可见图像
70年代以来,扫描声成像方法发展迅速
声束扫描经历了手动扫描、机械扫描、电子扫描或电子扫描与机械扫描相结合的几个阶段
声束聚焦也由透镜聚焦发展到电子聚焦、计算机合成
获得图像的方式和图像所含的内容也各有不同
B型声像平行于声束传播方向的物体断层的声像
广泛采用的有线扫描和扇扫描方式
线扫描采用换能器线阵,通过电子切换方法使聚焦声束沿线阵方向扫描,并逐次照射物体的不同部位,接收聚焦声束所达区域内的物体散射声信号,从而获得扫描断面内物体声散射信号的图像
扇扫描则是用相控扫描方法,旋转聚焦声束得到有一定张角的扇形截面内物体声散射信号的图像
C型声像图像为垂直于声束传播方向的物体断层的声像
它采用换能器面阵(或线阵加机械扫描)使聚焦声束在面阵范围内扫描,选取由焦点处散射的信号并加以显示,即可得到焦平面内物体声散射信号的图像
F型声像物体内任意断层的声像
与C型的区别在于,扫描聚焦声束的焦点不固定,需根据欲成像的断层位置作相应调整
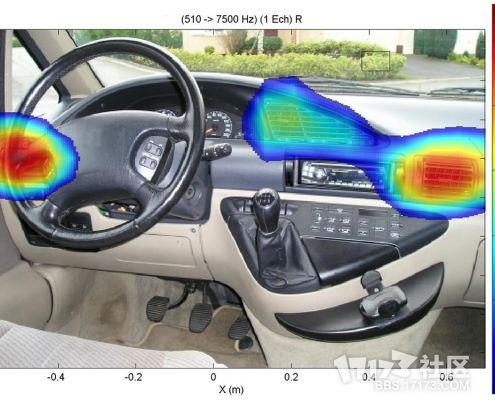
波束形成基于最大输出功率的可控波束形成技术 Beamforming,它的基本思想就是将各阵元采集来的信号进行加权求和形成波束,通过搜索声源的可能位置来引导该波束,修改权值使得传声器阵列的输出信号功率最大
这种方法既能在时域中使用,也能在波域中使用
它在时域中的时间平移等价于在波域中的相位延迟
在波域处理中,首先使用一个包含自谱和互谱的矩阵,我们称之为互谱矩阵(Cross-Spectral Matrix,CSM)
在每个感兴趣波长之处,阵列信号的处理给出了在每个给定的空间扫描网格点上或每个信号到达的能量水平
因此,阵列表示了一种与声源分布相关联的响应求和后的数量
这种方法适用于大型麦克风阵列,对测试环境适应性强
基于高分辨率谱估计基于高分辨率谱估计的方法包括了自回归 AR 模型、最小方差谱估计(MV)和特征值分解方法(如 Music 算法)等,所有这些方法都通过获取了传声器阵列的信号来计算空间谱的相关矩阵
在理论上可以进行有效估计,实际中若要获得较理想的精度,就要付出很大的计算量代价,而且需要较多的假设条件,当阵列较大时这种谱估计方法的运算量很大,对环境敏感,还很容易导致定位不准确,因而在现代的大型声源定位系统中很少采用
声达时间差声达时间差(TDOA)的定位技术,这类声源定位方法一般分为二个步骤进行,先进行声达时间差估计,并从中获取传声器阵列中阵元间的声延迟(TDOA);再利用获取的声达时间差,结合已知的传声器阵列的空间位置进一步定出声源的位置
以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。