自适应系统分类自从50年代末期由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统
主要有:(1)增益自适应控制(2)模型参考自适应控制(MRAC)(3)自校正控制(STC)(4)直接优化目标函数自适应控制(5)模糊自适应控制(6)多模型自适应控制(7)自适应逆控制模型参考自适应控制(model reference adaptive system,MRAS)和自校正控制系统(self-tuning control system)是比较成熟的两类自适应控制系统
这类自适应系统的一个主要特点是在线辨识对象数学模型的参数,进而修改控制器的参数
模型参考自适应控制系统这类自适应控制系统设计方法的理论基础为局部参数优化方法、李雅普诺夫稳定性理论和波波夫(Popov)超稳定性理论
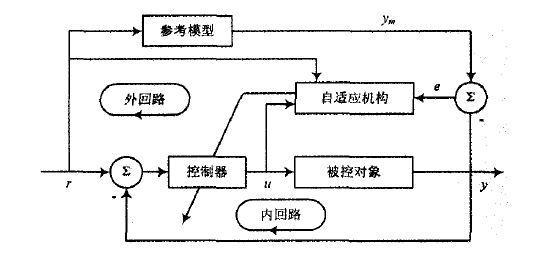
模型参考白适应控制系统由参考模型、被控对象、反馈控制器和调整控制器参数的自适应机构等部分组成,其基本原理如图1所示
这类控制系统包括内回路和外回路两个回路

内环是由被控对象和控制器组成的普通反馈回路,而控制器的参数则由外回路调整
参考模型的输出 直接表示了对象输出应当怎样理想地响应参考输人信号r
控制器参数的自适应调整过程如下:当参考输入r(t)同时加到系统和模型的入口时,由于对象的初始参数未知,控制器的初始参数不可能整定得很好

故一开始,运行系统的输出响应y(t)与模型的输出响应 是不可能完全一致,结果将产生偏差信号e(t),故可由e(t)驱动自适应机构来产生适当调节作用,直接改变控制器的参数,从而使系统的输出 y(t)逐步与模型输出 接近,直到 为止,当e(t)=0后,自适应调整过程就自动停止,控制器参数也就自动整定完毕
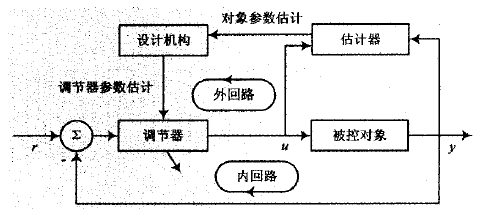
自校正控制系统(STC)自校正控制系统可以设想由两个环路组成,其典型结构如图2所示
该调节器的内环包括被控对象和一个普通的线性反馈调节器,外环则由一个递推参数估计器和一个设计机构所组成,其任务是辨识过程参数,再按选定的设计方法综合出控制器参数,用以修改内环的控制器

这类系统的特点是必须对过程或者被控对象进行在线辨识(估计器),然后用对象参数估计值和事先规定的性能指标在线综合出调节器的控制参数,并根据此控制参数产生的控制作用对被控对象进行控制
经过多次地辨识和综合调节参数,可以使系统的性能指标趋于最优
在自校正控制系统中,用来综合自校正控制律的性能指标有两类:优化性能指标和常规性能指标
前者如最小方差、LQG和广义预测控制;后者如极点配置和PID控制;用来进行参数估计的方法有最小二乘法、增广矩阵法、辅助变量法和最大似然法
以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。