PID算法简介PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写
顾名思义,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法,它是连续系统中技术最为成熟、应用最为广泛的一种控制算法,该控制算法出现于20世纪30至40年代,适用于对被控对象模型了解不清楚的场合
实际运行的经验和理论的分析都表明,运用这种控制规律对许多工业过程进行控制时,都能得到比较满意的效果
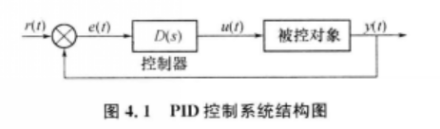
PID控制的实质就是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出
在工业过程中,连续控制系统的理想PID控制规律为: 式中,Kp——比例增益,Kp与比例度成倒数关系; Tt——积分时间常数; TD——微分时间常数; u(t)——PID控制器的输出信号; e(t)——给定值r(t)与测量值之差

以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。