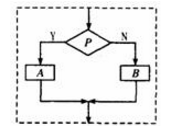
PID算法PID控制原理闭环控制是根据控制对象输出反馈来进行校正的控制方式,它是在测量出实际与计划发生偏差时,按定额或标准来进行纠正的
比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上
提到闭环控制算法,不得不提PID,它是闭环控制算法中最简单的一种
PID是比例 (Proportion) 积分 ,(Integral) 微分 ,(Differential coefficient) 的缩写,分别代表了三种控制算法
通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态
以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。