PID算法比例成比例地反映控制系统的偏差信号,偏差一旦产生,立即产生控制作用以减小偏差
比例控制器的输出u(t)与输入偏差e(t)成正比,能迅速反映偏差,从而减小偏差,但不能消除静差
静差是指系统控制过程趋于稳定时,给定值与输出量的实测值之差
偏差存在,才能使控制器维持一定的控制量输出,因此比例控制器必然存在着静差
由偏差理论知,增大虽然可以减小偏差,但不能彻底消除偏差
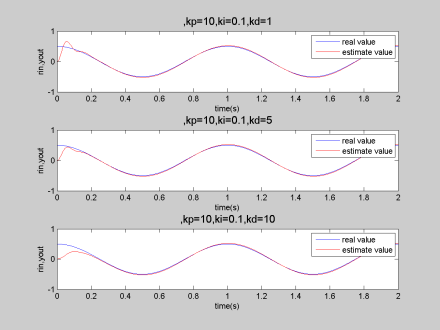
比例控制作用的大小除与偏差e(t)有关之外,还取决于比例系数Kp的大小
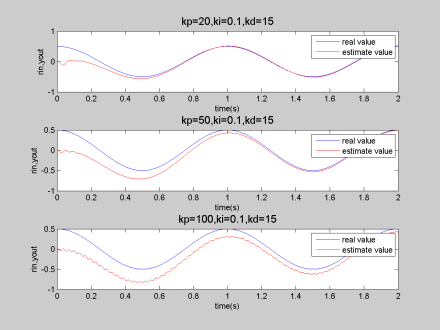
比例系数Kp越小,控制作用越小,系统响应越慢;反之,比例系数Kp越大,控制作用也越强,则系统响应越快
但是,Kp过大会使系统产生较大的超调和振荡,导致系统的稳定性能变差
因此,不能将Kp选取过大,应根据被控对象的特性来折中选取Kp,使系统的静差控制在允许的范围内,同时又具有较快的响应速度
以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。