PID算法微分微分环节的作用能反映偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间
积分控制作用的引入虽然可以消除静差,但是降低了系统的响应速度,特别是对于具有较大惯性的被控对象,用PI控制器很难得到很好的动态调节品质,系统会产生较大的超调和振荡,这时可以引入微分作用
在偏差刚出现或变化的瞬间,不仅根据偏差量作出及时反应(即比例控制作用),还可以根据偏差量的变化趋势(速度)提前给出较大的控制作用(即微分控制作用),将偏差消灭在萌芽状态,这样可以大大减小系统的动态偏差和调节时间,使系统的动态调节品质得以改善
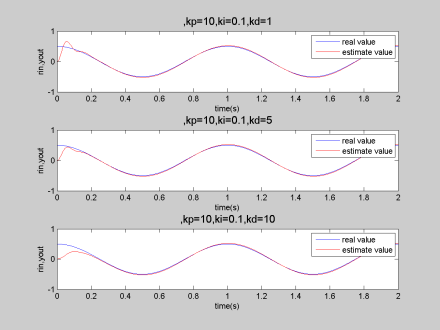
微分环节有助于系统减小超调,克服振荡,加快系统的响应速度,减小调节时间,从而改善了系统的动态性能,但微分时间常数过大,会使系统出现不稳定
微分控制作用一个很大的缺陷是容易引入高频噪声,所以在干扰信号比较严重的流量控制系统中不宜引入微分控制作用
微分控制作用的阶跃响应特性对于一个恒定的偏差量,不管其数值有多大,微分控制作用均为零
因此,微分作用不能消除静差,单独使用意义不大,一般需要与比例、积分控制作用配合使用,构成PD或PID控制
对于PID控制,在控制偏差输入为阶跃信号时,立即产生比例和微分控制中作用
由于在偏差输入的瞬时,变化率非常大,微分控制作用很强,此后微分控制作用迅速衰减,但积分作用越来越大,直至最终消除静差
PID控制综合了比例、积分、微分3种作用,既能加快系统响应速度、减小振荡、克服超调,亦能有效消除静差,系统的静态和动态品质得到很大改善,因而PID控制器在工业控制中得到了最为广泛的应用
以上内容由大学时代综合整理自互联网,实际情况请以官方资料为准。